
关闭杀毒软件进行安装和激活,附带激活补丁,请按照激活教程的每一步进行安装,否则可能安装失败。
polyworks metrology suite 2024中文免费版是InnovMetric打造的一体化全流程三维工业计量平台,由四大功能模块组合搭建,帮助企业提升生产效率、产品质量和盈利能力,工程师能够以前所未有的效率完成复杂零件的数据对齐、偏差分析与检测报告生成!
1、首先在本站下载解压,得到polyworks metrology suite 2024 IR3.2免费版和_SolidSQUAD_激活文件夹;
2、双击文件PolyWorksMS2024_IR3.2.exe开始安装;
3、安装完成,复制“SolidSQUADLoaderEnabler.reg”到电脑,运行并确认将信息添加到 Windows 注册表
4、重启电脑,将PolyWorks MS 2024文件夹复制到安装目录中,替换,默认C:\Program Files\InnovMetric\PolyWorks MS 2024
5、然后进入目录C:\Program Files\InnovMetric\PolyWorks MS 2024\bin,以管理员身份运行server_install.bat文件;
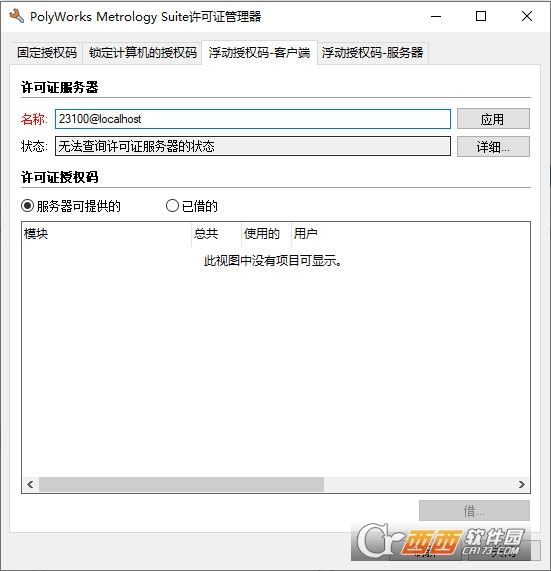
6、启动 PolyWorks > 工具 > IMkey 许可证管理 > 浮动密钥 > 客户端 >
许可证服务器名称的输入:23100@localhost > 应用
7、关闭IMkey许可证管理,好了,软件成功激活啦。
多工件并行编辑:在一个项目中同时载入多个零件实例,每个实例可以独立设置对齐基准、测量特征和公差标准。软件会生成每个零件的检测报告,也可以将所有零件的统计结果汇总在一张表格中。
嵌入式统计过程控制(SPC):针对同一个零件多次测量或多个同类零件的测量数据,自动计算均值、极差、标准差以及过程能力指数(Cpk和PpK),并以控制图(X-bar图、R图)的形式显示尺寸波动随时间的变化趋势。
宏语言与自动化:内置了功能强大的宏语言,用户可以将重复性的检测流程(如数据导入、对齐、特征提取、报告输出)录制为宏脚本。运行脚本时可以一键批量处理多个扫描数据文件,无需人工干预。
实时对齐与定位:支持最佳拟合对齐、基准目标对齐、RPS(参考点系统)对齐、3-2-1对齐以及基于特征(平面、圆、圆柱)的对齐。对齐过程中软件会实时显示偏差分布,用户可以动态调整参与对齐的点和权重。
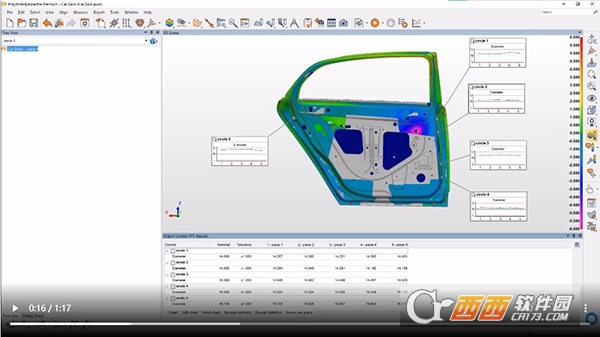
CAD对比分析:将扫描获取的点云或网格数据与原始CAD模型进行偏差对比,生成彩色偏差图(色阶图),直观显示超差区域的位置和数值。用户可以自定义色带范围(如红色代表+0.2mm以上,蓝色代表-0.2mm以下)。
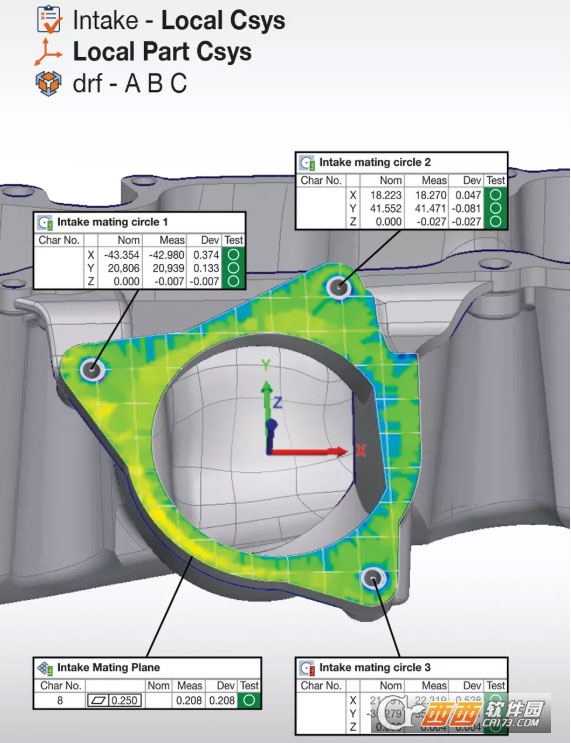
特征测量与GD&T:支持从点云或网格数据中拟合出基本几何特征(平面、圆、圆柱、圆锥、球、槽),并根据ISO或ASME标准自动计算出这些特征的位置度、垂直度、平行度、圆度、圆柱度等形位公差(GD&T)。
虚拟装配与间隙分析:将多个单独扫描的零件通过公共基准对齐到同一个坐标系下,分析装配体中的间隙值和干涉量。例如分别扫描发动机缸体和缸盖,在软件中模拟合装后的接合面间隙分布。
壁厚分析:对薄壁件(如钣金件、塑料壳体、铸件)进行壁厚分析,生成壁厚分布的彩色云图,自动标注壁厚过薄或过厚的危险区域。
截面与轮廓分析:在任意位置截取二维剖面,将测量点的截面轮廓与CAD理论轮廓叠加对比,计算出该截面上各个位置的偏差值,适用于叶片型面、翼型轮廓的检测。
自动特征识别:对扫描数据自动识别平面、圆柱面和孔位,无需人工逐个拾取。识别结果以列表形式呈现,用户可以批量确认或剔除错误识别项。
报告生成器:内置可自定义的报告模板编辑器,用户可以将偏差云图、尺寸表格、SPC控制图、截面轮廓等拖拽到报告模板中。报告可输出为PDF或Excel格式,支持一键批量生成多个零件的报告。
联机测量与实时反馈:支持直接连接便携式三坐标测量臂(如Faro、Romer)、激光跟踪仪(如Leica、Faro)或结构光扫描仪(如GOM、Creaform)。在测量过程中实时采集数据点并显示与CAD的偏差,指导操作员现场调整工件姿态。
点云与网格编辑:提供噪点过滤、异常点移除、平滑、补洞、简化网格等工具,用于清理扫描数据中的缺陷区域,提高后续拟合和检测的精度。
数字化装配与偏差模拟:在软件中移动和旋转单个零件的测量数据,模拟实际装配中的调整量,计算出最佳匹配位置下的累积偏差,用于指导现场装配垫片的厚度选择。
PolyWorks2024支持从三维扫描仪、便携式测量设备、坐标测量机(CMM)以及CAD软件中导入多种格式的数据。输入文件的操作分为“点云/网格数据输入”和“CAD模型输入”两类。
第一类:输入点云或网格数据(扫描数据)
启动PolyWorksInspector模块后,按照以下步骤操作:
点击顶部功能区菜单中的“文件”选项卡,选择“输入”→“点云/网格”。
在弹出的文件浏览器中,选择需要导入的文件。支持的主流格式包括:
点云格式:ASCII(.txt,.xyz,.asc,.csv)、PLY、DXF、IGES点
网格格式:STL(二进制和文本)、OBJ、PLY、VRML(.wrl)、3MF
扫描仪专用格式:Faro(.fls,.fws)、Leica(.pts,.ptx)、Romer(.rmt)、Creaform(.vxshp)、GOM(.g3d)
在导入选项对话框中,可以设置以下参数:
单位:毫米或英寸,需与扫描数据单位保持一致。
采样:如果点云过于密集,可以设置“随机采样”或“按网格采样”来减少点数,提高显示和处理速度。
法向计算:对于没有法向信息的点云,勾选“计算法向”以便后续进行最佳拟合对齐。
点击“确定”,数据会加载到当前项目中,显示在三维视口中。
第二类:输入CAD模型(参考数据)
点击“文件”→“输入”→“CAD模型”。
选择CAD文件格式。支持的主流格式包括:
通用格式:STEP(.stp,.step)、IGES(.igs,.iges)、Parasolid(.x_t,.x_b)、ACIS(.sat)、STL
原生CAD格式:CATIA(.CATPart,.CATProduct)、SolidWorks(.sldprt,.sldasm)、Creo(.prt,.asm)、NX(.prt)、Inventor(.ipt,.iam)
在导入选项对话框中,可以设置:
曲面公差:控制CAD曲面的离散精度,一般使用默认值即可。
保留曲线和点:是否同时导入CAD文件中的辅助线和基准点。
点击“确定”,CAD模型会以线框或着色形式显示在三维视口中,通常以不同颜色区分于点云数据。
第三类:从测量设备直接输入
如果扫描仪或三坐标测量机已通过USB或以太网连接到计算机:
点击“文件”→“输入”→“从测量设备”。
在弹出的对话框中选择设备类型和型号(如FaroEdge、LeicaAT960)。
建立连接后,软件会进入联机测量模式,操作员在设备上采集的数据点会实时传输到PolyWorks中显示。
第四类:批量输入多个文件
点击“文件”→“输入”→“批量输入”。
添加多个点云或CAD文件(可使用通配符批量选择)。
软件会为每个文件创建一个独立的工作空间,或者将所有文件合并到同一个工作空间中(取决于设置)。
步骤1:新建项目、导入数据
打开PolyWorks|Inspector,新建工程文件,保存项目路径;
导入设计CAD数模作为参考模型,再导入零件扫描点云/三坐标实测数据;
统一两套模型单位、坐标系,分层管理参考数模与实测数据。
步骤2:数据预处理对齐
实测点云进入预处理:去噪、删除多余外围杂点、修补扫描缺失破洞;
选用321基准对齐/最佳拟合全局对齐,完成实测件与CAD数模贴合配准。
步骤3:创建测量特征与公差
在功能区调取尺寸工具,在CAD模型拾取孔、平面、圆柱、轮廓等特征,标注图纸GD&T形位公差与尺寸上下限;
批量选取同类特征,一键复用公差参数,提升批量检测效率。
步骤4:实测运算、生成偏差结果
自动提取实测数据对应特征数值,软件自动计算实测值与理论值偏差,生成彩色3D偏差色谱云图,直观查看超差位置;
超差项自动标红预警,快速定位零件不合格区域。
步骤5:SPC数据分析+导出报告
多件零件数据汇总后开启SPC分析,查看批量尺寸波动与制程能力;
一键生成标准化质检报告,内嵌尺寸数据表、偏差云图,按需导出PDF/Excel存档。
拓展逆向建模流程(Modeler模块)
导入扫描点云→点云网格化降噪→修补模型缺陷→提取轮廓草图→拟合NURBS曲面→生成实体CAD模型,导出STEP用于后续设计加工。
此内容由AI根据文章内容自动生成,并已由人工审核
开发者其他应用

CV渲染器Chaos Vantage2.3.0中文免费版
 3D 制作
528.4M
正式版
3D 制作
528.4M
正式版
VRay7.4000 For 3max 2027中文最新版
3D 制作
1.37G
完整版
VR渲染器VRay7.4000 For max 2026中文完整版
3D 制作
1.39G
专业版
VR渲染器VRay7.4000 For max 2025汉化激活版
3D 制作
1.39G
最新版
NX6-NX12.0通用许可证中文绿色汉化版
3D 制作
2.0M
V1.0最新版
CV渲染器Chaos Vantage2.4.0免费版
3D 制作
438.4M
中文最新版
Chaos Vantage 2.5.1中文激活版
 3D 制作
477M
最新版本
3D 制作
477M
最新版本
chaos vantage 2.8.1渲染器最新版
 3D 制作
917.9M
中文激活版
3D 制作
917.9M
中文激活版
Chaos Vantage 2.6.1中文免费版
3D 制作
558M
完整版
Chaos Vantage 3.0.3汉化版
3D 制作
955.9M
Windows版


支持( 0 ) 盖楼(回复)